



La Marque RobotDyn, fabrique des produits de qualité supérieur avec un rapport qualité prix incomparable.

Les prix sont nets en Euros, sans application de TVA (Art. 293B du C.G.I.)

100% confiance. Vos achats et données sont totalement sécurisés.

Envoi le jour même si commande validée avant 11h30. Politique retours 14 jours.
La livraison sera entre le %MINIMAL_DATE% et le %MAXIMAL_DATE%
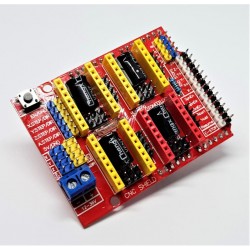
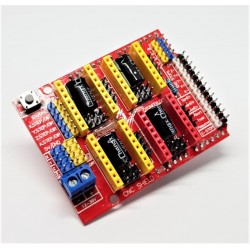
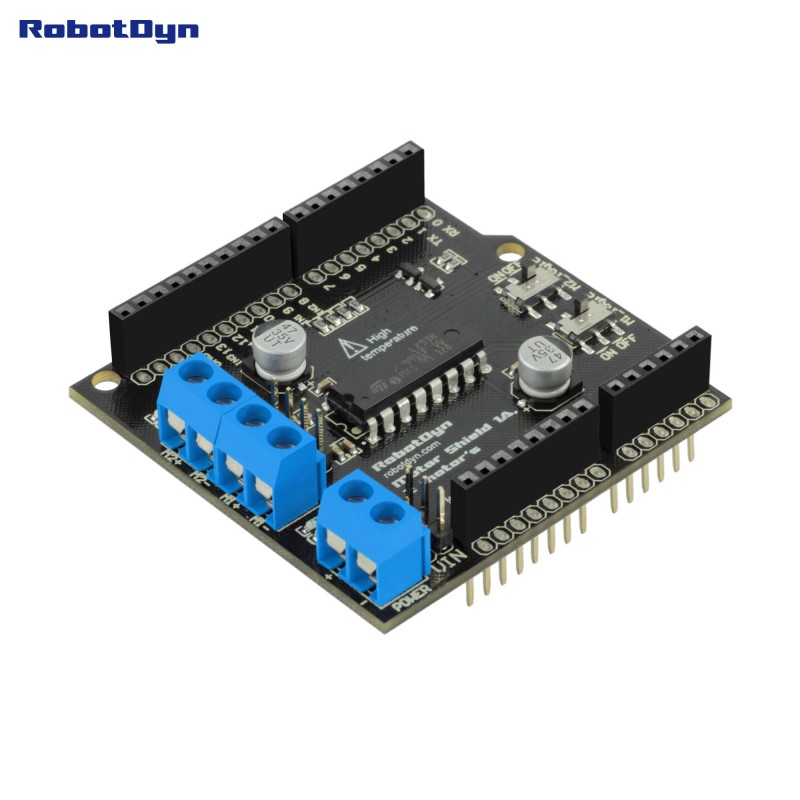
Le bouclier moteur (1A) pour Arduino vous permet de contrôler 2 moteurs CC: contrôlez la vitesse et le sens de rotation, arrêtez le mouvement du moteur ou du bloc. Vous pouvez contrôler chaque moteur séparément. Vous pouvez également gérer une puissance de moteur pas à pas bipolaire jusqu'à 2A.
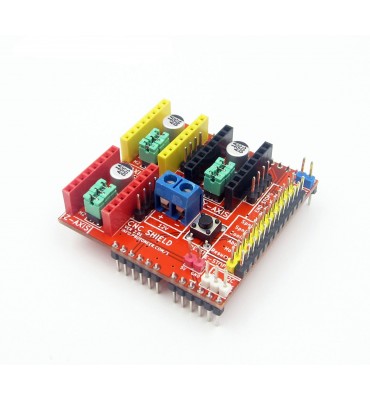
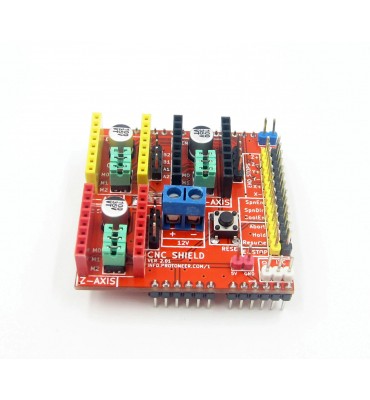
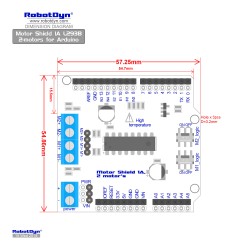
Le bouclier moteur (1A) est basé sur la puce L293 avec une tension d'alimentation de 5-36V et une consommation de tension maximale de 1A par moteur (canal). La carte peut être installée dans la carte de connexion Arduino: Uno, Duemilanove et Mega.
La carte a des LED indiquant le sens de rotation de chaque moteur.
Le réglage de la vitesse est effectué en utilisant le mode PWM standard (PWM) dont le signal peut être fourni avec les broches Arduino 10 et 11 du PWM (le mode de sortie numérique prend en charge la modulation PWM à largeur large).
Il y a 2 modes de contrôle de la rotation du moteur:
Contrôle direct: Moteur 1 - Sorties, 8, 9, 10 (PWM) / Moteur 2 - Sorties: 11 (PWM), 12.13,
Contrôle logique: Moteur 1 - Sorties, 9, 10 (PWM) / Moteur 2 - Sorties: 11 (PWM) 13.
Pour changer le mode de contrôle, utilisez les commutateurs sur la carte. Chaque canal a son propre commutateur. En mode de commande directe, 3 sorties Arduino sont utilisées pour chaque canal. En mode de contrôle logique, les sorties Arduino 8 et 12 sont libérées, seules 4 sorties numériques sont impliquées.
Détails techniques:
Pilote quadruple semi-canal en H: L293;
Tension de contrôle logique: 5V (à partir d'Arduino);
Tension motorisée: 6,5 ~ 12 V (alimentation VIN), 4,8 ~ 35 V (source d'alimentation externe);
Consommation maximale: 5W;
Courant de charge: total - 2A (1A par canal)

| Transporteur | Informations | Livraison |
|---|---|---|

|
2 à 5 jours ouvrés |
La Marque RobotDyn, fabrique des produits de qualité supérieur avec un rapport qualité prix incomparable.